CopKa
Kontakt: Maximilian Prexl
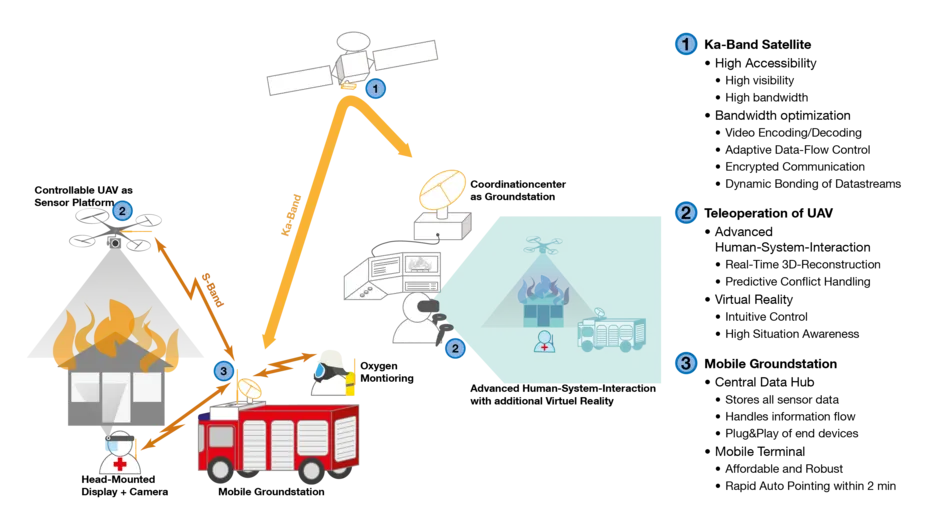
Das CopKa-System ist eine satellitengestützte, multisensorielle Plattform zur Einsatzführungsunterstützung im K/Ka-Band (17 – 30 GHz). Hauptaugenmerk hier liegt auf einem telepräsent gesteuerten Multi-Sensor Unmanned Aerial Vehicle (UAV), welcher über den Satellitenlink vom Disponenten gesteuert werden kann. Der Disponent in der Leitstelle erhält so ein verbessertes Lagebild und kann die Einsatzkräfte vor Ort besser koordinieren, sowie bei einer eventuellen Personensuche unterstützen.
Forschungsziele des Projektes:
- Robustheit und automatische Ausrichtung der Antenne
- Kompakte und kostengünstige Antenne
- Modulare und intuitive Einsatzführungsunterstützungssoftware für Einsatzleiter und Disponenten
- Innovative Videodekodierung und –enkodierung zur Übermittlung von Bilddaten
- Entwicklung einer Mensch-System-Schnittstelle für eine robuste, sichere und einfache Teleoperation
CopKa bei der Großübung München-Land:

Mehr Informationen
CopKa in der Presse
Ausgangslage
Die deutschen Rettungskräfte nutzen eine Kommunikationsarchitektur, die nicht dem aktuellen technischen Standard entspricht. Die in Behörden und Organisationen mit Sicherheitsaufgaben (BOS, d.h. Polizei, Feuerwehr und Rettungsdienste) verwenden zum Teil noch analoge Funktechnik im 4 m und 2 m Band, die in den frühen 1970er Jahren entwickelt wurde. Da der weiterentwickelte Digitalfunk (TETRA) noch nicht flächendeckend im Einsatz ist, gibt es Einschränkungen in der Nutzbarkeit, insbesondere von Multimedia Anwendungen. Somit ist ein neues Betriebs- und Kommunikationskonzept für den modernen Rettungsdienst erforderlich, welches durch CopKa erforscht wird.
Das Konzept
Die aktuell genutzte Kommunikationstechnik bietet keine zeitgemäße Infrastruktur für moderne multimediale Anwendungen. Beispielsweise benötigt die Sprachkommunikation zwischen den Einsatzkräften vor Ort und der Rettungsleitstelle ein hohes Maß an Funkdisziplin, um präzise Lagemeldungen durchführen zu können. Nach dem Eintreffen der ersten Einsatzkräfte ist ein großes Maß an Zeit notwendig, die Notfallsituation und Lage zu Erfassen und diese an die Leitstellen mitzuteilen. Dabei wird der Leitstelle nur per Sprachkommunikation die Lage beschrieben. Dieses Vorgehen erzeugt Stress für die Rettungskräfte und benötigt wertvolle Zeit für die Versorgung der Patienten, welche durch innovative Technologie verringert werden kann.
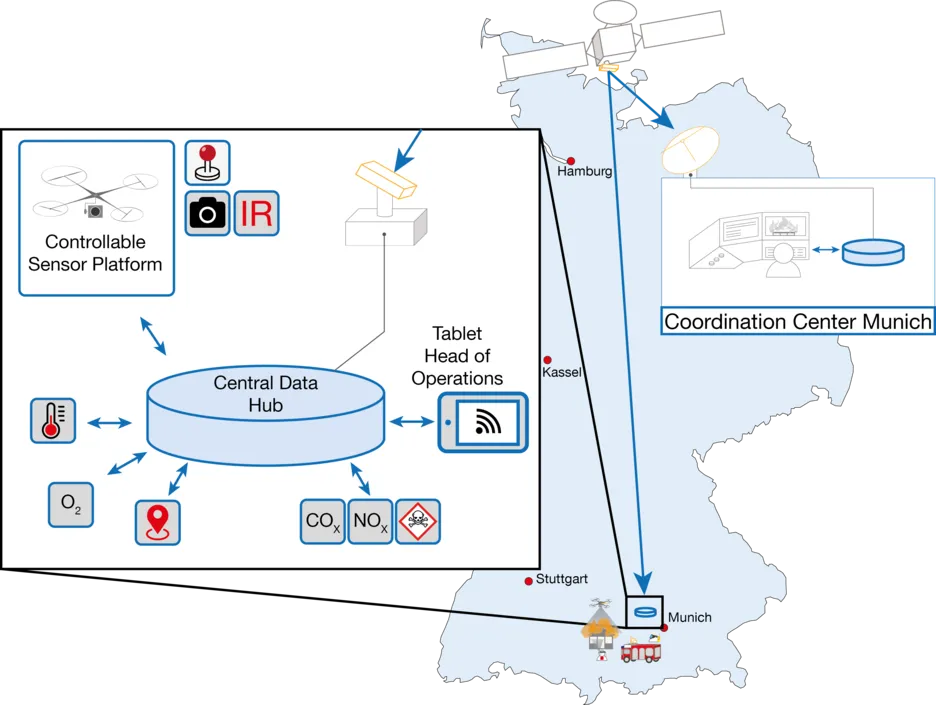
Das in CopKa geförderte Projekt ist eine Kommunikationsarchitektur für eine multisensorielle Einsatzabwicklung, welche in dieser Art noch nie gezeigt wurde. Im Kern besteht diese aus einer Art Datenzentrale auf dem Einsatzfahrzeug, welche alle Daten sammelt und eine Kommunikationsverbindung zwischen Einsatzfahrzeug und Leitstelle herstellt. Primärer Kommunikationskanal ist ein Ka-Band Satellit, welcher durch eine sekundäre Kommunikationsverbindung (LTE) unterstützt werden kann. Diese vernetzte Link-Konfiguration ermöglicht einen sicheren und reibungslosen Ablauf des Einsatzes und benötigt kein Eingreifen der Einsatzkräfte. Dazu richtet sich das SatCom-Terminal automatisch zu dem Kommunikationssatelliten aus und verbindet sich mit diesem. An dieser Schnittstelle können beliebige Sensoren und Systeme hinzugefügt oder entfernt werden. So besitzt das CopKa-System die Kapazität, autonome Systeme (z. B. UAV) anzubinden, diese zu steuern und verschiede Sensoren zu erfassen.
Vorteile des Konzepts für Behörden und Organisationen mit Sicherheitsaufgaben
Das vorgeschlagene Konzept hat gegenüber bisher vorgestellten/genutzten Technologien den Vorteil, dass außerhalb des Mobilfunkbereichs hohe Datenraten für den Einsatz sichergestellt werden können. D.h. durch die hohe Abdeckung des Satelliten ist es möglich, innerhalb Europas auf eine Kommunikation zurückzugreifen, selbst wenn das kein terrestrische System vorhanden ist.
Des Weiteren kann mithilfe dieses Konzepts der Disponent direkt in den Einsatz eingebunden werden. Dieser ist nicht nur in der Lage die Situation aufgrund der vorliegenden Daten besser zu evaluieren, sondern kann auch direkt mit einem steuerbaren UAV die Personensuche unterstützen oder auch wichtige Gasmessungen aus dem Flug heraus durchführen.
Um den Disponenten sowie auch der Einsatzleitung direkten Zugang zu allen bestehenden Informationen zu ermöglichen, bietet die Betriebssoftware die Möglichkeit, verschiedene Endgeräte an das CopKa Systems anzumelden und die Relevanz der Daten zu evaluieren und diese über den Satellitenlink zu verteilen, egal ob es sich um Video-, Bild- oder Sensordaten handelt.
Konsortium und Projektträger
CopKa ist ein für 3 Jahre (2015-2018) durch das BMWi gefördertes Projekt (Förderkennzeichen 50YB1523) mit den Projektpartnern Technische Universität München (Institut für Raumfahrttechnik), IMST GmbH, LSE Space GmbH, TV1 GmbH und dem Deutschen Zentrum für Luft- und Raumfahrt als Projektträger.



Publikationen
M. Tebbe; M. Prexl; A. Hoehn; U. Walter (2017): Satellite Visibility Map for Emergency Services Applications. In: IAC 2017. Adelaide, AUS.
J. Letschnik; H. Enke; S. Letschnik; A. Hoehn; M. Tebbe; N. Zunhammer; M. Prexl; U. Walter; S. Otto; J. Mosig; A. Presta; M. Geissler; T. Christ; M. Westphal (2017): COPKA – SATELLITENBASIERTES SAR SYSTEM ZUR EINSATZFÜHRUNGSUNTERSTÜTZUNG VON BEHÖRDENANWENDUNGEN IM KA-BAND. In: DLRK Muenchen. Munich, GE.
M. Prexl; K. Struebig; J. Harder; A. Hoehn (2017): User studies of a head-mounted display for search and rescue teleoperation of UAVs via satellite link. In: IEEE Aerospace Conference 2017. Big Sky, Montana, USA.
M. Prexl; M. Tebbe; A. Hoehn; U. Walter (2016): Aktuelle Herausforderungen in der Stuerung von einem UAV über einen Ka-Band Satellitenlink in einem Feuerwehreinsatz. In: DLRK Braunschweig. Braunschweig, GE.
H. Enke; J. Letschnik; E. Stoll; U. Walter (2014): Satellite Based Search and Rescue Operations Handling using Multi-Sensor UAV. In: IAC GLAC 2014. Paris, FR.
Media


