Annual Meeting of Mobility@TUM 2018
Annually, all Chairs that work on mobility-topics gather to inform and discuss about the current projects. The platform enables networking and exchange amongst the employes.
Shaping Future Transportation Systems
G. Hiermann, F. Rüdel, H. Schaap, C. Pfeiffer, B. Scheiper, P. Klein , G. Walther M. Schiffer
Professorship of Operations and Supply Chain Management / TUM School of Management
A B S T R A C T
In this project, we analyze the impact of different city center restrictions, e.g., charging a fee for internal combustion engine vehicles driving in city centers on last-mile deliveries. In this context, we especially focus on the viability of electric commercial vehicles in short-haul logistics fleets. We use operations research methods to account for the behavior of logistics fleet managers in their daily operations. The experimental results for three real-world case studies (Paris, Vienna, New York City) show that the distance based fees are superior to per-entry based fees to realize ecological and economical goals. Once the designed restrictions enforce the usage of electric vehicles, their operation yields additional ecological benefits outside the city center.
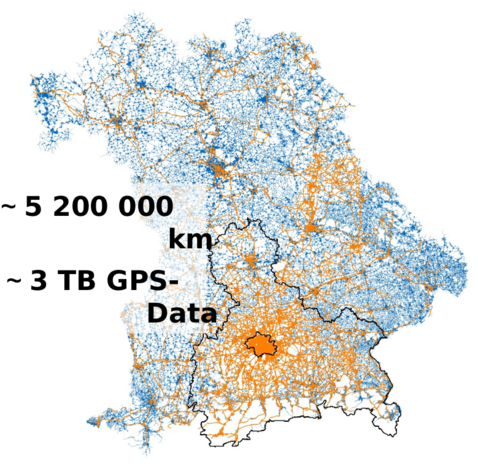
Acquisition, Processing and Evaluation of Vehicle Movement Data
Adam Waclaw
Institute of Automotive Technology / TUM Department of Mechanical Engineering
A B S T R A C T
This presentation presents a holistic framework foracquiring, processing, and applying vehicle fleet test data for usein automotive research. The framework features a method for usingsmartphones and OBD data loggers applied up front to acquirespecific vehicle fleet test data. The recorded data is subsequentlystored in a relational database. Acceleration and other sensorand OBD data collected is processed in this database. Thisprocessing comprises data management, metadata creation, andapplication of a mapmatching algorithm. Various tools thenanalyze the stored and processed vehicle fleet test data. Differentexamples from current and ongoing research projectswill suggest the framework’s prospective possibilities.
Kinetosis as a Challenge of Future Mobility Concepts and Highly Automated Vehicles
Dominique Bohrmann
Chair of Ergonomics / TUM Department of Mechanical Engineering
A B S T R A C T
Automated driving can fundamentally change road transportation and enhance quality of life by allowing non-driving related tasks. However, at present, the interaction of humans in automated vehicles is not clearly established. Besides technical and legal requirements, the human being with its physiological boundary conditions needs to be observed in detail. The following study describes fundamental approaches to predict the stimulus response of the human organism called Kinetosis (Motion Sickness) and decrease symptoms by changing the seating position in real test driving conditions. Among other effects, it can be shown that reclined postures lead to a significant improvement in the sense of comfort.
K U R Z F A S S U N G
Mit dem Einzug des automatisierten Fahrens ist eine grundlegende Veränderung der Mobilität zu erwarten, da fahrfremde Nebentätigkeiten zunehmend an Bedeutung bei der Konzeptionierung zukünftiger Fahrzeuge gewinnen werden. Neben technischen und rechtlichen Anforderungen ist der Mensch mit seinen physiologischen Gegebenheiten in den Fokus dieser Entwicklung zu stellen. Die folgende Studie beschreibt Ansätze zur Prädiktion einer vegetativen Reizreaktion des menschlichen Organismus namens Kinetose (Motion Sickness). Zusätzlich werden Gegenmaßnahmen beschrieben, um mögliche Symptome von Unwohlsein und Übelkeit zu erforschen und zu verhindern. Unter anderem kann gezeigt werden, dass eine flache Sitzlehnenneigung zu einer deutlichen Verbesserung des Komfortempfindens führt.
Advanced Optimization for Shared Mobility
Layla Martin
Logistics and Supply Chain Management / TUM School of Management
A B S T R A C T
The Advanced Optimization in a Networked Economy (www.adone.gs.tum.de) group presented their research on advanced optimization for shared mobility. The overall research focuses on various aspects of operations research and optimization of shared mobility, with a specific focus on large-scale problems and data sets (and the required analytics), influence of multiple decision makers (competition), and uncertainty due to externalities (i.e., customer behavior). From an optimization or operations research standpoint, all shared mobility offers are somewhat similar. We, thus, consider carsharing, bikesharing, taxi systems and ridesharing. All operators of shared mobility solutions face similar challenges on strategic, tactical, and operational levels: On a strategic level, the research of Adone members focuses on fleet sizing and composition (number of vehicles and types of vehicles), definition of the operating area, and where to locate stations (rental or charging stations). On a tactical level, we consider demand prediction, design of pricing schemes and rebalancing techniques. The actual relocation of bikes or cars belongs to the operational level, along with decisions on actual price discounts, as well as matching customers and vehicles.
Analysis of the impact of on-demand mobility services on mobility in the city of Munich
Christian Assmann
Chair of Urban Structure and Transport Planning / Department of Civil, Geo and Environmental Engineering
A B S T R A C T
This research project investigates potential impacts of future on-demand mobility (ODM) services on urban mobility in the city of Munich. More in detail, the impact of ODM services on traffic flow, emissions and space are being studied using a system thinking / system dynamics approach. In order to analyze relevant future scenarios, general conditions and influencing factors of ODM services are been discovered using explorative Expert-Interviews. Based on the results of the System Model (using System Dynamics), recommendations for the implementation and development of ODM services are generated.
Robust Design of Sensors and Functions in Vehicular Safety
Christoph Stöckle and Wolfgang Utschick
Associate Professorship of Signal Processing / TUM Department of Electrical and Computer Engineering
A B S T R A C T
Vehicular safety functions that intervene in dangerous driving situations shall increase automotive safety, but they are typically very vulnerable against sensor imperfections and measurement errors have a negative impact on both the safety and the satisfaction of the customer. In this work, a universal methodology for the robust design of vehicular safety systems, e.g., an automatic emergency braking (AEB) system, considering sensor measurement errors is proposed. Introducing a stochastic model, the proposed robust design of an AEB system is formulated as a mathematical optimization problem, that provides optimal values for the parameters of the AEB system, i.e., of both its sensor and its function, with respect to a probabilistic quality measure. (Christoph Stöckle, Wolfgang Utschick, Stephan Herrmann and Tobias Dirndorfer, “Robust Design of an Automatic Emergency Braking System”, The 21st IEEE International Conference on Intelligent Transportation Systems (ITSC 2018), November 4-7, 2018, Maui, Hawaii, USA)
Extended Observer for Urban Traffic Control
Eftychios Papapanagiotou
Chair of Traffic Engineering and Control / TUM Department of Civil, Geo and Environmental Engineering
A B S T R A C T
Das Internet der Dinge eröffnet in verschiedenen Disziplinen neue Möglichkeiten des Informationsaustauschs in vollständig vernetzten Systemen. Dies gilt auch für Verkehrssysteme und insbesondere für das städtische Verkehrsmanagement, wo die Vernetzung durch Vehicle to Infractructure (V2I), Vehicle to Vehicle (V2V), Floating Car Data (FCD) und andere digitale Informationen der Verkehrsteilnehmer ermöglicht wird. Das Ziel von Forschungsprojekt CENTAURO ist es, eine robuste Methodik zu entwickeln und zu testen, mit deren Hilfe eine verbesserte Verkehrszustandsschätzung durch Verwendung künftig vorhandener Datenquellen möglich ist. Die verbesserte Verkehrszustandsschätzung soll in ein bestehendes Verkehrssteuerungssystem integriert werden und so zu einer präziseren und flexibleren Steuerung führen, während gleichzeitig die Abhängigkeit von stationärer Detektion reduziert werden soll.
The TUM-VT bicycle simulator - recent projects on bicycle traffic research
Andreas Keler, Georgios Grigoropoulos, Heather Kaths, Matthias Spangler, Fritz Busch
Chair of Traffic Engineering and Control / TUM Department of Civil, Geo and Environmental Engineering
A B S T R A C T
The bicycle traffic research group at the Chair of Traffic Engineering and Control at the Technical University of Munich use a physical bike simulator for various applications in different projects. Based on the connection of a steering and speed sensor, we can transfer movements of test subjects into different VR environments for evaluating various aspects of urban traffic. We compare the perceptions of different designs of countdown timers for bicyclists based on frequencies of red light violations and stopping and starting delays with comparable scenarios. Besides guaranteeing this user experience, we imply a specific component in our simulator application: the connection with microscopic traffic flow simulation. Via the SUMO-Connect function, we are able to interact with simulated traffic participants in urban scenarios for (1) the evaluation of different bicycle highway designs with differing infrastructural elements, flows, and, bicyclist compositions, and, for (2) the evaluation of various bicyclist maneuvers in connection to the interactions with autonomous vehicles.