Research Areas
TUM robotic research comprises three main areas with regards to applications:
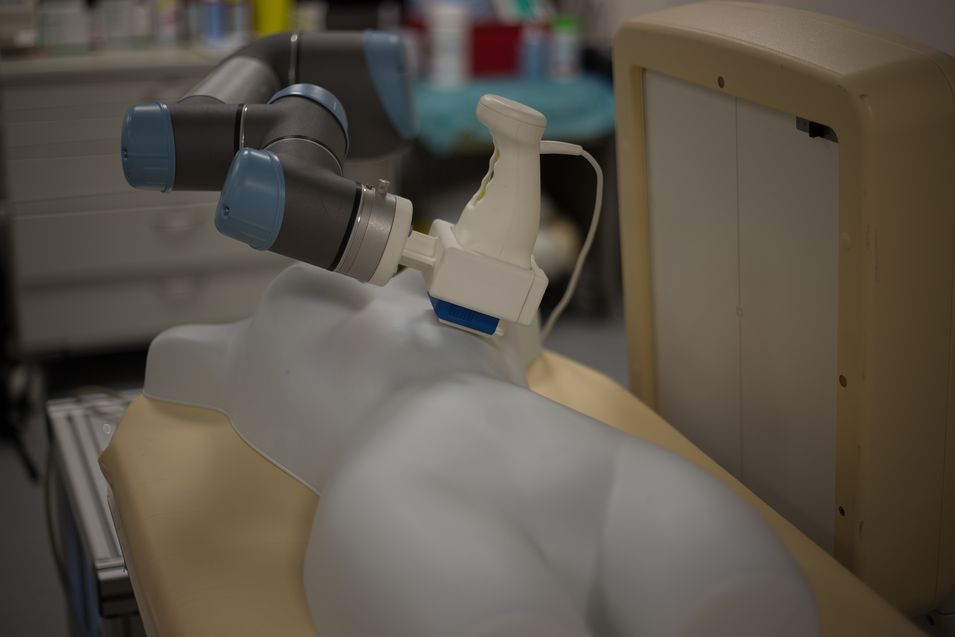
Healthcare Robotics
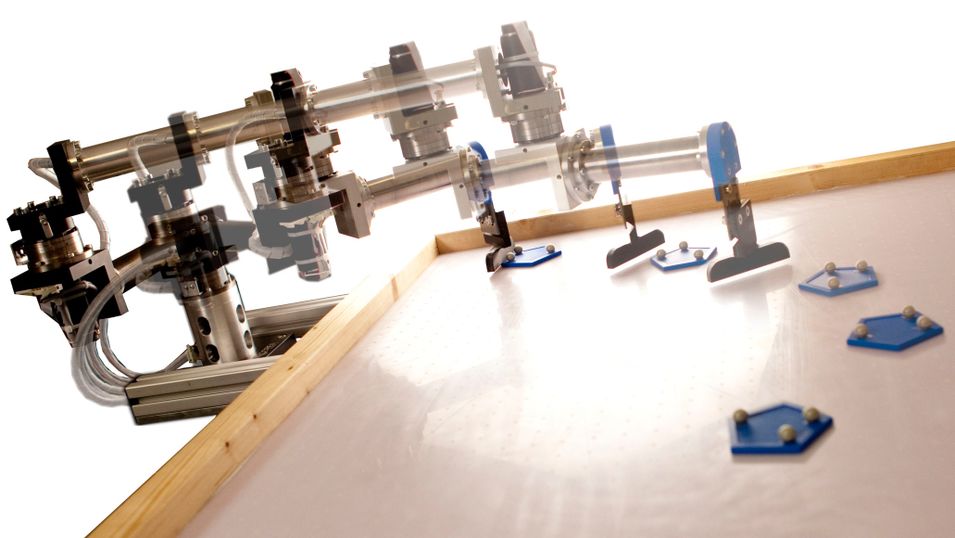
Advanced Manufacturing and Production

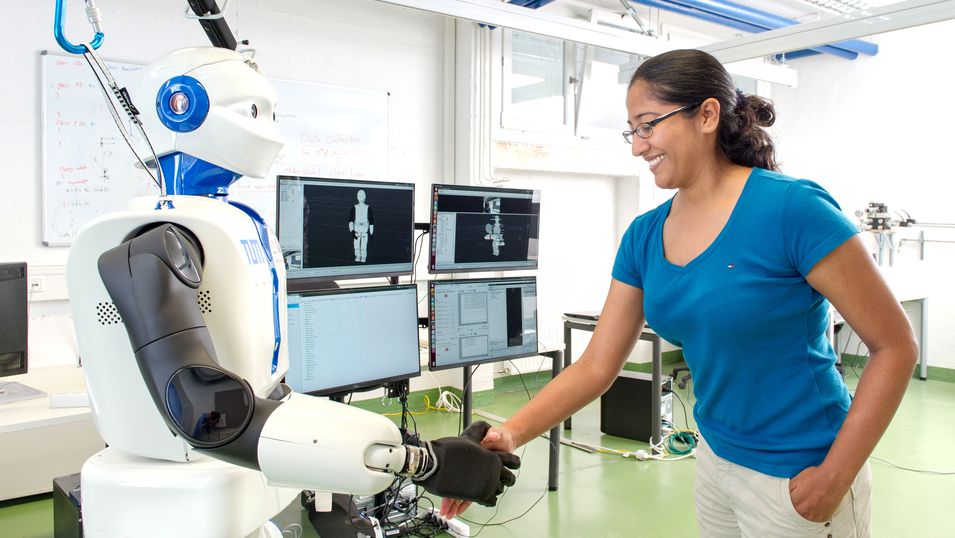
Intelligent and Autonomous Systems

Methodical competences of TUM robotic researchers can be grouped in four core areas:
Robot Design
Modeling, Simulation and Visualization
- Prof. Althoff
- Prof. Burschka
- Prof. Knoll
- Prof. Kellerer
- Prof. Klinker
- Prof. Navab
- Prof. Günther
- Prof. Hirche
- Dr. Leibold
- Prof. Lohmann
- Prof. Lüth
- Prof. Reinhart
- Prof. Rixen
- Prof. Senner
- Prof. Vogel-Heuser
- Prof. Walter
- Prof. Zäh
Design and Manufacturing of Mechanisms, Sensors and Actuators
- Prof. Albu-Schäffer
- Prof. Cheng
- Prof. Conradt
- Prof. Drechsler
- Prof. Lohmann
- Prof. Lüth
- Prof. Reinhart
- Prof. Rixen
- Prof. Senner
- Prof. Steinbach
Design and Analysis of Peripheral Systems
Design of Architectures, Middleware and Communication
Robot Skills
Perception and Recognition
- Prof. Bengler
- Prof. Burschka
- Prof. Conradt
- Prof. Cremers
- Prof. Diepold
- Prof. Günther
- Prof. Klinker
- Prof. Lüth
- Prof. Navab
- Prof. Reinhart
- Prof. Rigoll
- Prof. Steinbach
- Prof. Vogel-Heuser
- Prof. Walter
- Prof. Wollherr
Motion/Action/Process Planning
- Prof. Albu-Schäffer
- Prof. Althoff
- Prof. Buss
- Prof. Cheng
- Prof. Lee
- Dr. Leibold
- Prof. Lohmann
- Prof. Reinhart
- Prof. Rixen
- Prof. Vogel-Heuser
- Prof. Wollherr
Manipulation
Human-Machine Interaction
Fundamentals
Control and Systems Theory
- Prof. Albu-Schäffer
- Prof. Althoff
- Prof. Buss
- Prof. Cremers
- Prof. Hirche
- Dr. Leibold
- Prof. Lohmann
- Prof. Rixen
- Prof. Zäh
Artificial Intelligence, Learning and Optimization
- Prof. Bengler
- Prof. Carle
- Prof. Cremers
- Prof. Diepold
- Prof. Hirche
- Prof. Kleinsteuber
- Prof. Knoll
- Prof. Kellerer
- Prof. Lee
- Dr. Leibold
- Prof. Lohmann
- Prof. Rigoll
- Prof. Walter
- Prof. Wollherr
- Prof. Zäh
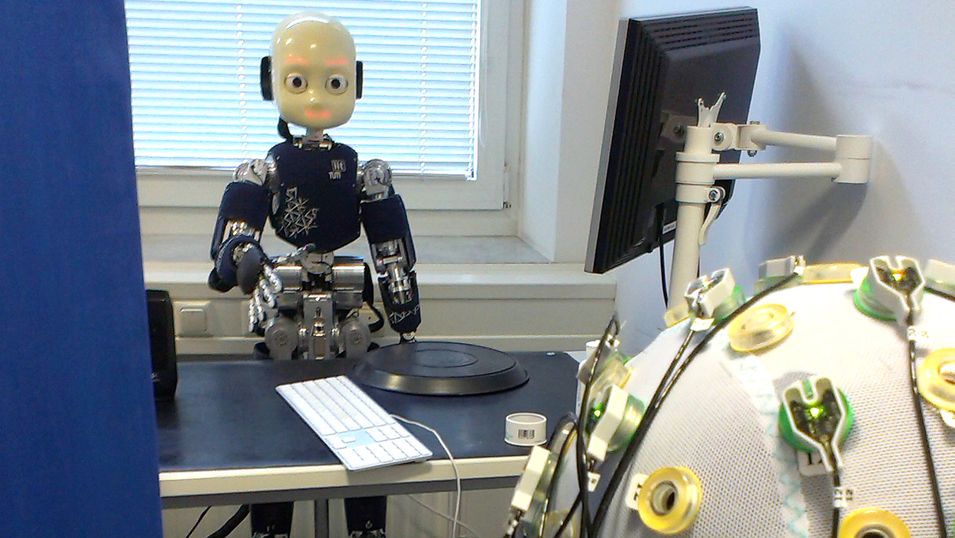
Neuroscience and Bio-inspired Approaches
Languages, Algorithms and Verification
Society, Humanities and Economy
