Robots
We have several robots that are used for research and teaching in the different chairs, some of them are bought, others developed completely by us. Here is an overview:

H-1 @ Institute for Cognitive Systems
ICS' the first full-size humanoid robot H-1 is a biped human-sized robot (1.65 m length and 80 kg weight). It has a total of 44 degrees of freedom. The robot was funded by DFG - Deutsche Forschungsgemeinschaft (German Research Foundation) in the program "Major Research Instrumentation".
More information: http://www.ics.ei.tum.de/en/research/platforms/humanoid-robot-h-1
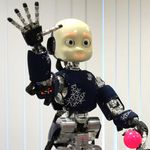
iCub @ Institute for Cognitive Systems
The iCub is the humanoid robot developed at IIT and was adopted by more than 20 laboratories worldwide. It has 53 motors that move the head, arms & hands, waist, and legs. It can see and hear, it has the sense of proprioception (body configuration) and movement (using accelerometers and gyroscopes). We are working to improve on this in order to give the iCub the sense of touch and to grade how much force it exerts on the environment.
More information: http://www.ics.ei.tum.de/en/research/platforms/icub

Iuro @ Chair of Automatic Control Engineering
The Interactive Urban Robot (IURO) is capable of navigating to a designated place in town without prior map knowledge or GPS information. It retrieves direction information by asking passers-by. The goal of the project is to develop and implement methods and technologies enabling robots to navigate and interact in densely populated, unknown human-centred environments and retrieve information from human partners in order to achieve a given task goal.
More information: www.iuro-project.eu

Joint Assembly Robot @ Chair of Automatic Control Engineering
In a joint assembly project supported by Siemens AG, a human and a robot are supposed to jointly assemble a given object based on a construction plan. Task distribution is done during the execution based on motion prediction, intention recognition and task understanding.

Nao @ TUM
NAO is a programmable, 58cm tall humanoid robot. It has 25 degrees of freedom (DoF) and features two cameras, four directional microphones, a sonar rangefinder, two IR emitters and receivers, one inertial board, nine tactile sensors and eight pressure sensors in its feet. Various communication devices, including voice synthesizer, LED lights, and 2 high-fidelity speakers are part of its design as well as Intel ATOM 1,6ghz CPU (located in the head) that runs a Linux kernel and supports Aldebaran’s proprietary middleware (NAOqi).
Naos are used as a research and education platform, for example in the course “Projektpraktikum RoboCup” https://www.ics.ei.tum.de/en/teaching/ws2016/projektpraktikum-humanoid-robocup , a joint course by several chairs of the Department Electrical and Computer Engineering.

Schunk LWA 4P Modular Robot @ Robotics and Embedded Systems
This is a modular robot which can be disassembled and reassembled in different configurations. We use the Schunk LWA as a testbed for researching control and optimal configuration of modular robots, and also safe human-robot interaction.

TOM @ Institute for Cognitive Systems
TOM is a robot that was built at the ICS. It consists of two UR-5 arms and a base (Compact omni-directional mobile platform). The arms of TOM are currently equipped with robotic skin cells (see Cellul.A.R.Skin).
More information: http://www.ics.ei.tum.de/en/research/platforms/robot-tom