Cyber-Physical Systems / Embedded Control Systems
Cyber-Physical Systems find their way into various domains like automotive, avionics and industrial automation. Compared to conventional embedded systems, the notion of Cyber-Physical Systems puts particular emphasis on the interaction between the embedded systems and the physical processes to be controlled. Therefore, besides all the concerns of embedded systems design like resource efficiency, cost, real-time capability, reliability, safety, security, an extra dimension of control should be considered.






Many of the control applications in those domains are safety-critical and therefore require guarantees on safety and performance of the closed-loop systems. Moreover, in cost-sensitive embedded systems like in automotive, industry automation, etc., only limited computation and communication resources is available for each control loop. Correspondingly, it is often observed that these requirements of resource efficiency on one hand and safety and performance on the other hand are conflicting in nature. For example, the cheaper the communication is, e.g., Collision Sense Multiple Access/ Collision Detection (CSMA/CD), Aloha, Slotted Aloha, etc., the more the network uncertainties like variable transmission delay, packet drops, etc. Conversely, expensive communication systems like Token Ring, Time Division Multiple Access (TDMA), Polling, etc., provide network determinism and guarantees on closed-loop timing properties and consequently better stability and performance analysis opportunities. In this context, various aspects of networked embedded control systems like variable delay, sampling jitter, packet drops, intermittent faults, etc., have attracted both the control theorists and the computer scientists over the last decades.
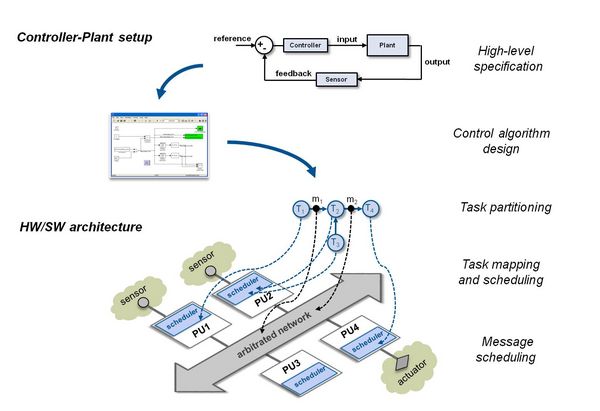
On one hand, the consideration of the actual implementation of the control software is essential to designing safe and efficient control systems. Traditionally, embedded control systems are designed separately, where control engineers design the control systems and the embedded system engineers design the implementation aspects like software, scheduling, communication. Later the two parts are integrated and validated. Therefore, the conventional design paradigm usually follows an iterative manner, which requires considerable effort of testing and integration. Furthermore, the control engineers often use idea assumptions like negligible execution time of the software and communication latency, the absence of jitter, etc. However, the actual implementation of the control software introduces additional constraints on the control design. This could lead to either the case of unsafe controller implementation due to mismatch of assumptions and reality or over-conservative design due to safe yet pessimistic assumptions.
On the other hand, it is also difficult to design efficient (e.g., in terms of embedded resources) embedded control systems in the separate design scheme. If the control design and embedded systems design are considered jointly as a whole problem, the system design can be optimized according to different objectives like control performance and resource utilization, leading to a more efficient design.
The research challenges here is firstly that the control design and embedded systems design are conventionally addressed by two different communities. Therefore the paradigms, methods and tools used in both domains are different. Therefore, it is difficult to develop a unified approach that simultaneously address the design and analysis problems in both domains. One other important challenge is the complexity. Modern embedded systems are already complex enough to be addressed. Coupled with a further dimension in control, the complexity of the problem can easily explode and it is difficult for co-design approaches to scale as the size of the system increases. To address these challenges, we are currently looking at efficient definition of the interfaces between the two domains and optimization methods that can better scale or offer reasonable trade-off between optimality and computational effort.
Our research on this topic concentrates on the following topics:
- Resource-efficient control/communication co-design: In this topic, we consider specific settings and try to develop design methodologies or approaches for joint synthesis of controller and communication parameters such that resource usage is minimized.
- Implementing controllers on hybrid (mixed time- and event-triggered) architectures: Control loops need not be invoked at high frequency when the system is in undisturbed state. This fact can be exploited to devise a switching strategy such that high bandwidth is guaranteed when the system is disturbed using time-triggered communication and can be switched to unreliable event-triggered communication when a steady state is reached.
- Control over heterogeneous networks: With advancement in adavance driver assistance systems and autonomous driving, applications requiring inter-domain communication have become prominent. Correspondingly, design of such cross-domain applications requires careful consideration of communication over gateways and different communication protocols. Formulation and solving such heterogeneous problems is an important research direction in this topic.
- Improving QoC using elastic communication resources: Nondeterministic communication resources are cheap but cannot give any timing gurantees. Here, we are looking into devising control algorithms and strategies such that these resources can be used to improve qualiy of control (QoC) over a base performance given by the deterministic resource.
- Control over shared communication channel: When number of control application share a given communication channel, it is required to distribute resource in a way such that the overall QoC is maximized. Here, it is interesting to analyze the overheads involved in multiple access of the channel and to exploit such information while designing the controllers as well as the sharing strategy. For example, switching resource allocation from one application to another may involve some overheads which can be considered in the optimizaion while design the system.
- Memory-aware control design
- Security-aware control design
- Joint control/platform co-synthesis
- Design flow and toolchain for the design and implementation
- Control over multi-core architectures
Recent Publications
- Memory-Aware Embedded Control Systems Design, Wanli Chang, Dip Goswami, Samarjit Chakraborty, Lei Ju, Chun Jason Xue, Sidharta Andalam. In IEEE Trans. on CAD of Integrated Circuits and Systems, 36(4): 586-599, 2017.
- Multi-Objective Co-Optimization of FlexRay-Based Distributed Control Systems, Debayan Roy, Licong Zhang, Wanli Chang, Dip Goswami, Samarjit Chakraborty. In Proc. of IEEE Real-Time and Embedded Technology and Applications Symposium (RTAS), pages 279-290, 2016.
- Automated synthesis of cyber-physical systems from joint controller/architecture specifications, Debayan Roy, Licong Zhang, Wanli Chang, Samarjit Chakraborty. In Proc. of IEEE International Forum on Specification and Deisng Languages (FDL), pages 1-8, 2016.
- Model-based design of resource-efficient automotive control software, Wanli Chang, Debayan Roy, Licong Zhang, Samarjit Chakraborty. In Proc. of IEEE/ACM International Conference on Computer-Aided Design (ICCAD), 2016.
- Relaxing Signal Delay Constraints in Distributed Embedded Controllers, Dip Goswami, Reinhard Schneider, Samarjit Chakraborty. In IEEE Trans. Control System Technology, 22(6): 2337-2345, 2014.
- Timing analysis of cyber-physical applications for hybrid communication protocols, Alejandro Masrur, Dip Goswami, Samarjit Chakraborty, Jian-Jia Chen, Anuradha Annaswamy, Ansuman Banerjee. In Design Automation and Test in Europe, 2012.
- Multi-layered scheduling of mixed-criticality cyber-physical systems, Reinhard Schneider, Dip Goswami, Alejandro Masrur, Martin Becker, Samarjit Chakraborty. In Journal of Systems Architecture - Embedded Systems Design, 59(10-D): 1215-1230, 2013.
- Characterizing feedback signal drop patterns in formal verification of networked control systems, Dip Goswami, Samarjit Chakraborty, Purandar Bhaduri, Sanjoy K. Mitter. In Proc. of IEEE International Symposium on Computer-Aided Control System Design (CACSD), pages 13-18, 2013.
- Constraint-Driven Synthesis and Tool-Support for FlexRay-Based Automotive Control Systems, In International Conference on Hardware/Software Codesign and System Synthesis (CODES+ISSS), 2011.
- Re-engineering Cyber-Physical Control Applications for Hybrid Communication Protocols, In 14th Proceedings of the Conference for Design, Automation and Test in Europe (DATE), 2011.
- Co-design of Cyber-Physical Systems via Controllers with Flexible Delay Constraints, In 16th Asia and South Pacific Design Automation Conference (ASP-DAC), 2011. (Best Paper Award)
- Schedulability analysis of distributed cyber-physical applications on mixed time-/event-triggered bus architectures with retransmissions, Alejandro Masrur, Dip Goswami, Reinhard Schneider, Harald Voit, Anuradha Annaswamy, Samarjit Chakraborty. In IEEE International Symposium on Industrial Embedded Systems, 2011.
- Optimizing Hierarchical Schedules for Improved Control Performance, In 5th International Symposium on Industrial Embedded Systems (SIES), 2010.